
Développement sur les microcontrôleurs PIC24 de Microchip

J’ai récemment eu la chance d’explorer les possibilités de développement firmware pour nos projets embarqués sur les microcontrôleurs PIC24 de Microchip. Ce n’est pas une surprise, j’ai l’habitude d’être emballé par l’accessibilité des technologies de Microchip (facilité d’utilisation, documentation, support et expérience en général). Voilà pourquoi j’aimerais partager ce petit tutoriel sur la prise en main du développement sur les microcontrôleurs PIC24.

Je me suis donc procuré un kit de développement Microstick disponible ici.
Spécifications du matériel
Le Microstick pour la série K des microcontrôleurs 5V PIC24 est la solution parfaite pour ceux qui cherchent une plateforme de développement 16-bit à faible coût, extrêmement portable et facile d’utilisation. Le kit est alimenté via USB et inclut un débogueur/programmeur sur le circuit, un socle DUT pour faciliter l’échange du microcontrôleur, une DEL utilisateur et un bouton de réinitialisation. Le kit supporte les microcontrôleurs 5V PIC24 de type « KA » et « KM ».
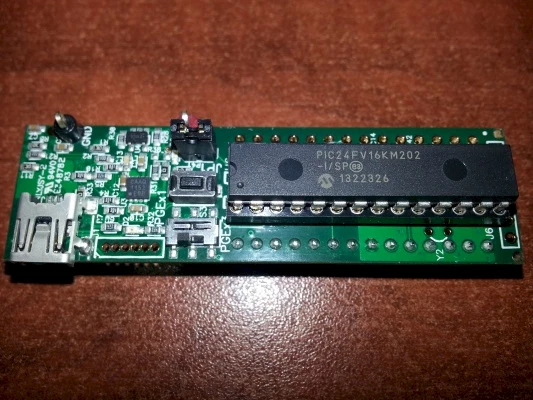
Le kit vient dans une belle boite de rangement (semblable à celle pour les jeux vidéo sur PC) et contient le matériel suivant :
- Une plaquette Microstick pour la série K des microcontrôleurs 5V PIC24 ;
- Un câble USB ;
- Un microcontrôleur PCI24FV16KM202 (28-pin).
Le Microstick supporte les microcontrôleurs « KA » et « KM » de format 28-pin SPDIP suivants :
- PIC24FV16KM202 (inclu dans le kit)
- PIC24FV08KM202
- PIC24FV16KM102
- PIC24FV08KM102
- PIC24FV32KA302
- PIC24FV16KA302
Les détails sur les spécifications et fonctionnalités du PIC24FV16KM202 peuvent être consultés ici.
Installation et préparation
Le kit de développement supporte l’IDE MPLAB de Microchip, ce qui rend le développement très simple et rapide. L’environnement de développement intégré MPLAB doit être installé avant d’utiliser le Microstick 5V PIC24. Cette plaquette est conçue pour fonctionner avec la version 1.60 ou plus récente de l’IDE. Bien que l’environnement de développement fournit les outils d'assemblage, la majorité du code peut être écrit en langage C et nécessite l’installation du compilateur. Le compilateur MPLAB XC16 de Microchip s’intègre facilement dans l’IDE.
Le compilateur et l’IDE sont gratuits pour fins d’évaluation. Cependant, la version gratuite du compilateur est limitée à 60 jours avec le niveau d’optimisation 01. Après ce délai, le compilateur fonctionne encore, mais l’optimisation est désactivée ce qui fait en sorte que la taille du code compilé peut augmenter.
Pour télécharger :
- MPLAB X IDE : www.microchip.com/mplabx
- Compilateur MPLAB XC : www.microchip.com/xc16
Pour ma part, j’ai utilisé la version 2.20 du MPLAB X IDE et 1.22 du compilateur MPLAB XC16. Autre chose intéressante en rapport au développement sur le PIC24 (et Microchip en général), l’environnement de développement et le compilateur fonctionnent tant sur Windows, Linux 32 et 64-bit que Mac OS X.
Exécuter la démonstration
Une fois le téléchargement terminé, l’IDE et le compilateur installés, il ne suffit que de quelques étapes pour bâtir, exécuter et déboguer un firmware. Pour ce tutoriel, nous allons simplement utiliser l’exemple qui est fourni avec le Microstick. Sans grande surprise, l’exemple est le « Hello, world! » standard du monde de l’embarqué : faire clignoter une DEL !
Le code pour la démonstration peut être téléchargé sur la page du produit « Microstick for 5V PIC24 K-Series » de Microchip : PIC24FV16KM202%20demo.zip
- Décompresser le projet de démonstration dans un répertoire de son choix.
- Connecter le Microstick à l’ordinateur à l’aide du câble USB.
- Lancer l’application IDE MPLAB X.
- Ouvrir le projet de démonstration (via File –> Open Project…). Le dossier devrait être nommé « pic24fv16km202_microstick_demo.X ».
- Ouvrir les propriétés du projet (via File –> Project Properties…) et s’assurer que le bon périphérique est sélectionné (Microchip Starter Kits –> Starter Kits (PKOB)).
- Bâtir, transférer et exécuter l’application de démonstration du Microstick (via Debug -> Debug Project).
- Mettre le cavalier (jumper) JP1 en place afin d’activer la DEL sur le circuit afin de voir le résultat de l’exécution.
Code de la démonstration
Comme je l’ai mentionné plus tôt, le code de l’exemple est fort simple. Il s’agit tout simplement de faire clignoter la DEL. Si on se concentre seulement sur le corps du code, on a ceci :
int main(void)
{
unsigned int i;
TRISAbits.TRISA0 = 0;
while(1)
{
for(i = 0; i < 65535; i++)
{
Nop();
Nop();
Nop();
Nop();
}
LATAbits.LATA0 ^= 1;
}
}
Résultat
Si vous avez suivi les étapes, vous devriez voir clignoter à intervalles réguliers la DEL sur la plaquette, comme sur la photo ci-dessous.
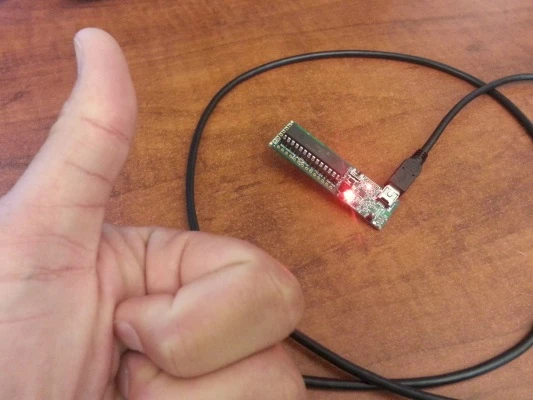
Comme dirait Dave Jones : « Thumbs up! » ou encore « Beauty! » (www.eevblog.com).
Conclusion
Nous avons débuté par discuter de ce que le kit contenait. Ensuite, nous avons parlé plus spécifiquement des fonctionnalités du microcontrôleur 5V PIC24 de Microchip. Nous avons enchainé avec l’installation et l’exécution du code de démonstration pour terminer par l'observation du résultat. Le kit de développement « Microstick for 5V PIC24 K-Series » permet de faire à faible coût et rapidement du développement 16-bit sur les microcontrôleurs.